

Earlier Versions
| Name | Size | Uploaded | Game Version | Downloads | |
| Rover Platform With Launcher.craft release | 1.21 MB | Mar 21, 2015 | 0.90 | 846 |  Download Download |
Screenshots


Description
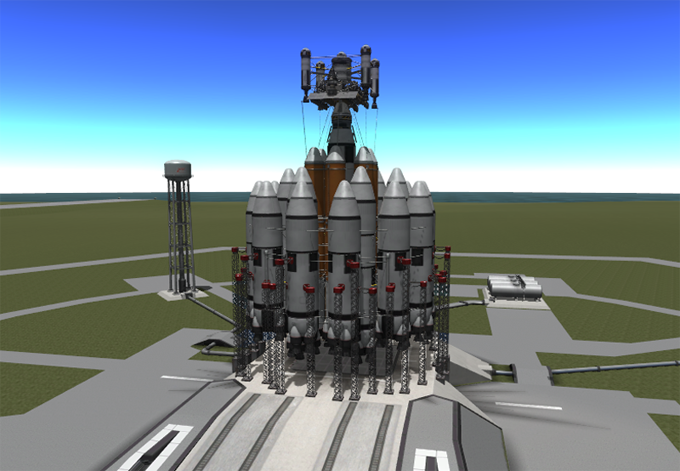
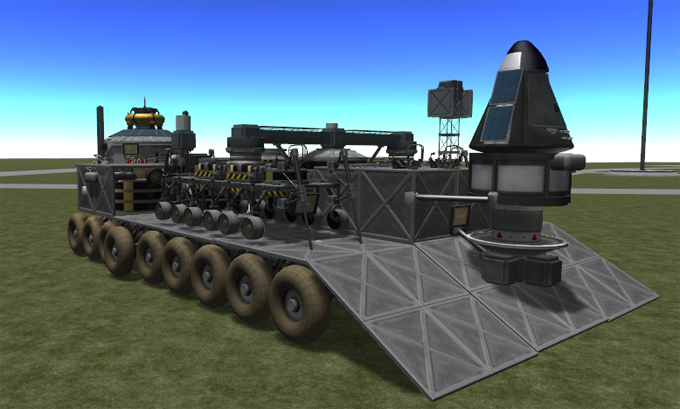
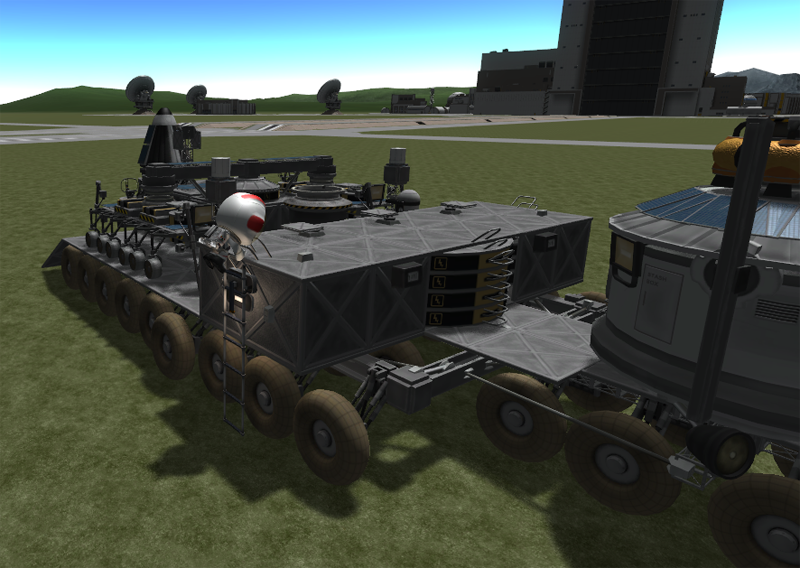
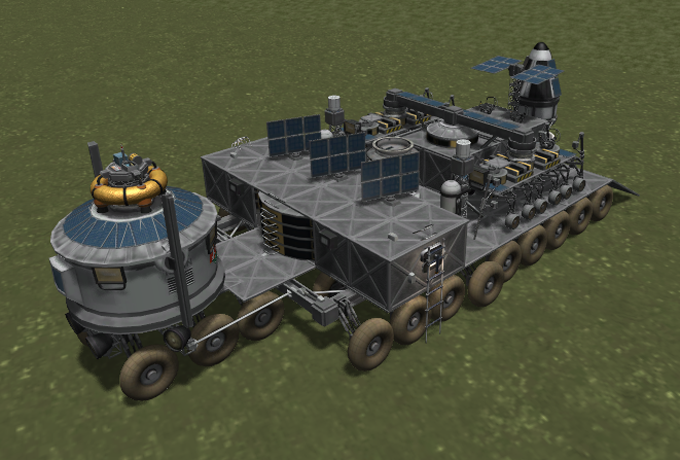
The TR-0420-SS Rover Platform is a large heavy duty Rover designed to carry survey and probing equipment.
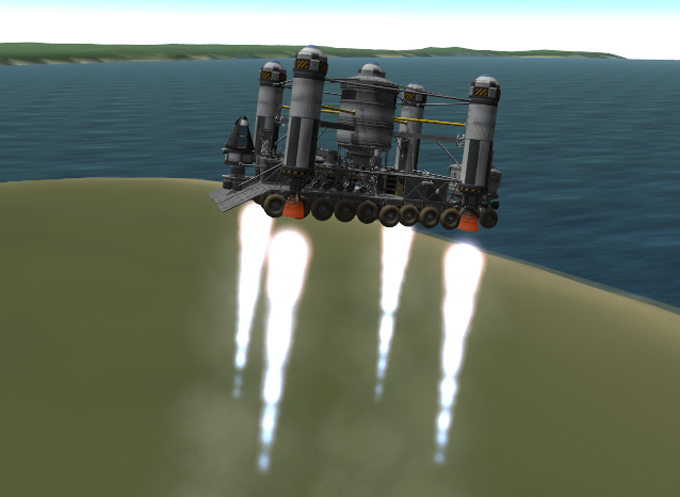
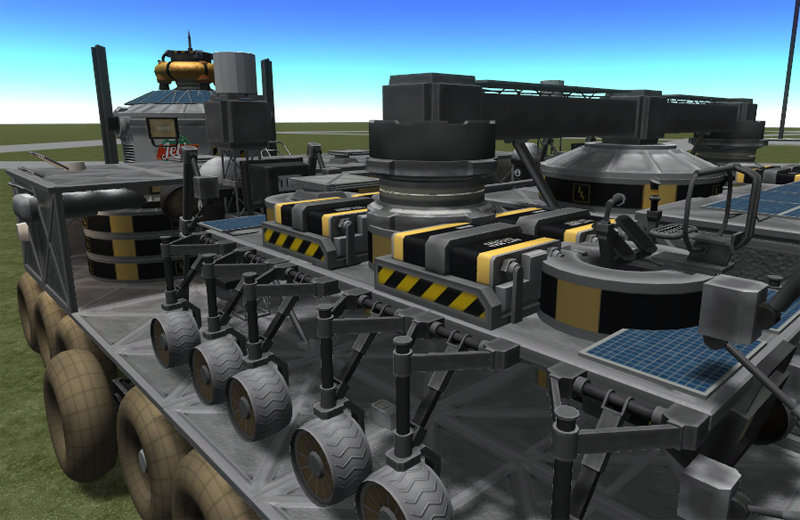
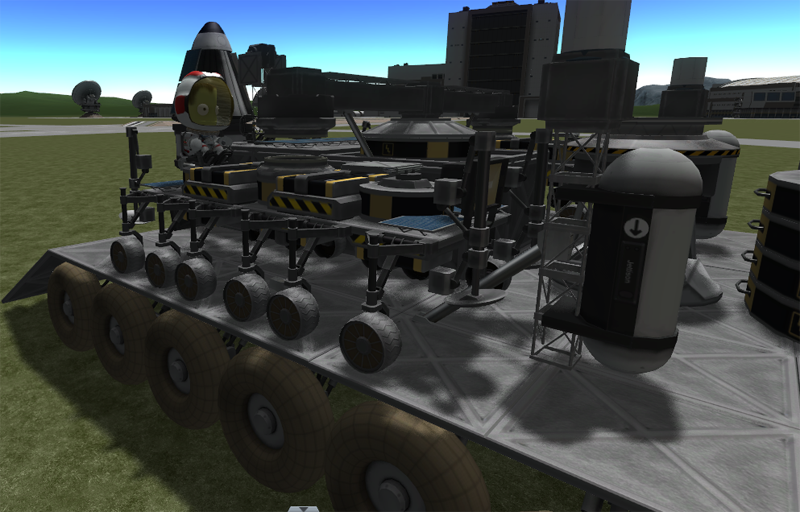
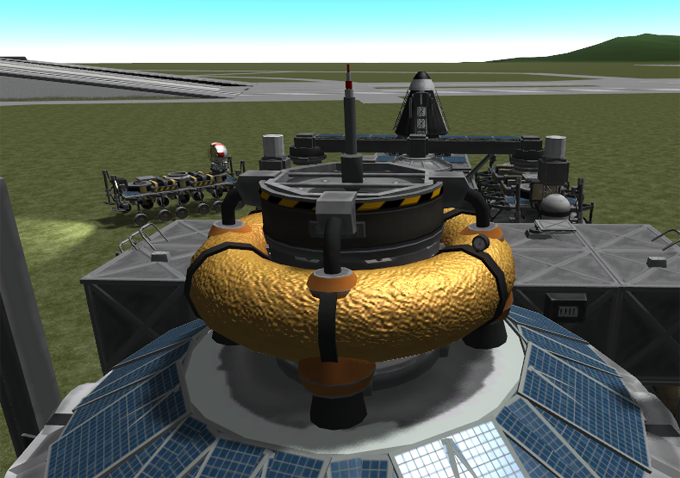
The TR-0420-SS consists of a durable frame supporting a large chassis. It carries 2 Mini-Rovers (TR-0410-SS) which are attached to a custom Jebadiah designed docking clamp. The TR-0420-SS also features a launchable probe with scientific equipment and an escape pod. The TR-0420-SS is landed by a detachable carrier which can land by engine and or parachute. The launcher is powerful enough to reach other planets.
Jebadiah's Pro-Tips…
1. When launching do not start your turn until 11 Km she is a fat pig.
2. Make sure when you launch you are controlling from the launch vehicle remote guidance system.
3. When you are landing make sure you switch control to the remote guidance system on the lander.
4. When you have landed you can launch the landing vehicle by giving it slight throttle, enough to pull at the ground vehicle but not lift it, right click on the clamp-o-tron and decouple the node.
5. Don't forget to right click the batteries of the TR-0410-SS and enable them before use.
Undocking / Docking TR-0410-SS
1. Board or control the remote guidance system.
2. Right click docking port holding the TR-0410-SS and decouple the node.
3. Switch control back to the TR-0410-SS and retract the landing gears.
4. Right click the batteries of the TR-0410-SS and enable them before use.
5. Back down the ramp and have fun; you might not want to let Jebadiah drive. Make sure your brake is off.
6. Docking is the reverse, drive up the ramp and position the TR-0410-SS under the docking port.
7. Switch control to the TR-0410-SS docking port and set the docking port you are aligned with as target.
8. Engage the landing gear.





Add a comment